Selección adecuada de un motor eléctrico asíncrono
Si necesita sustituir un motor eléctrico asíncrono de corriente alterna, le indicamos los criterios más utilizados para la correcta selección en fundición de sus necesidades. En muchos casos la información puede obtenerse consultando la propia placa de identificación del motor.
Seleccionar un motor eléctrico asíncrono
A la hora de seleccionar un motor eléctrico asincrónico trifásico y/o monofásico es importante considerar los siguientes criterios, que son los más utilizados para obtener el motor eléctrico más adecuado para la aplicación deseada.
La potencia
Es la fuerza que el motor genera para mover una carga a una determinada velocidad.
La potencia especificada en placa de los motores indica la potencia mecánica disponible en la punta del eje del motor y va expresada en Kilowatts (KW) y en su equivalente en Caballos de Vapor (HP / CV).
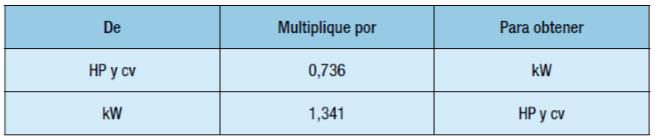
Para convertir los valores de unidades de potencia, usted puede usar las formulas abajo:
Ejemplo: ¿Cuántos Kw tien un motor de 5,5 CV?
5,50 X 0,736 = 4,04 (4,00kW)
Nota: La potencia especificada en la placa de identificación del motor, indica la potencia mecánica disponible en la punta del eje.
Para obtener la potencia eléctrica consumida por el motor (kW.h), se divide la potencia en kW por su eficiencia (η).
Ejemplo:
η = 84,5% (Dato de placa para motor de 4Kw / 5,50 CV)
P (kW/h) = (4,00/ 0,845) = 4,73/ kW h
La velocidad/rotación
Expresada en rpm (revoluciones por minuto), es el número de giros que el eje del motor desarrolla en cada minuto.
En los motores de corriente alterna la rotación del eje está sincronizada con la frecuencia de la corriente de alimentación (Hz), dándonos el número de pares de polos del motor.
Para las frecuencias de 50 Hz y 60 Hz, tenemos:
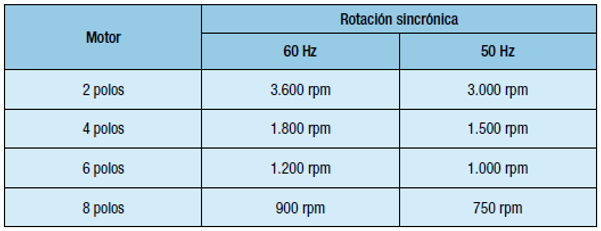
Los motores de 2 y 4 polos son los más vendidos en el mercado.
Deslizamiento: El concepto de deslizamiento es usado para describir la diferencia entre la rotación sincrónica y la rotación efectiva en la punta del eje del motor. Factores como la carga o inclusive la variación de la tensión de la red de alimentación, pueden influenciar en la rotación del motor.
La tensión
La tensión es el voltaje de entrada para el cual está diseñado el motor; es decir, es la presión con la que el motor empuja la corriente a través de un circuito eléctrico cerrado. Se expresa en voltios (V) y debe coincidir con la el voltaje de la máquina que se desee accionar.
Tipos de tensión:
Monofásica:
Es la tensión medida entre fase y neutro. El motor monofásico normalmente está preparado para ser conectado en la red de 110 V o 220 V. Sin embargo, hay sitios donde la tensión monofásica puede ser 115 V, 230 V o 254 V. En estos casos debe ser aplicado un motor específico para estas tensiones.
Trifásica:
Es la tensión medida entre fases. Son los motores más utilizados, pues los motores monofásicos tienen limitación de potencia, y además de esto suministran rendimientos y pares menores, lo que aumenta su costo operacional. Las tensiones trifásicas más utilizadas son 220-230 V, 380-400 V a 50Hz y 440 V a 60Hz
Los motores se suministran standard de acuerdo con los siguientes parámetros de diseño :
- 230/400 V D/Y 50 Hz (PN) / 275/480 V D/Y 60 Hz (PN * 1,2)
- 400/690 V D/Y 50 Hz (PN) / 480/830 V D/Y 60 Hz (PN * 1,2)
Los motores pueden trabajar sin cambiar la potencia nominal conectada a una toma de corriente aún cuando las fluctuaciones del voltaje (a frecuencia nominal) difiera N en un +/- 5% del valor nominal (patrón de voltaje en medida
A). Los voltajes standard establecidos según normas DIN IEC 38 se toman como punto base.
Por lo que la gama cubierta por un motor standard es :
- 220-240 V / 380-420 V D/Y 50Hz (PN = 100%)
- 380-420 V / 660-720 V D/Y 50Hz (PN = 100%)
- 240-265 V / 420-460 V D/Y 60Hz (PN = 100%)
- 420-460 V / 720-800 V D/Y 60Hz (PN = 100%)
- 265-290 V / 460-500 V D/Y 60Hz (PN = 120%)
- 460-500 V / 790-870 V D/Y 60Hz (PN = 120%)
Los motores deben usarse con el voltaje especificado en DIN IEC 38 con una tolerancia total de +/- un 10%.
La frecuencia
Es el número de veces que un determinado evento se repite en un determinado intervalo de tiempo.
La frecuencia de la red de alimentación utilizada en Latinoamérica es 50 Hz o 60 Hz, dependiendo del país. Eso significa que la tensión de la red repite su ciclo sesenta veces por segundo.
Es un factor importante, ya que influye directamente en la rotación del motor eléctrico.
Un ejemplo para calcular la velocidad de un motor conociendo el numero de polos es:
- Ns = (60 x Hz) / (numero de polos / 2)
Ejemplo:
Motor de 4 polos conectado a una linea de 50Hz le velocidad síncrona sería:
- Ns= (60×50) / (4/2) = 1500rpm
Esto es muy practico cuando variamos la frecuencia a través de variadores de velocidad, de esa manera podremos informar al cliente a que velocidad girará el motor en función de la frecuencia que establezcamos.
Grado de protección
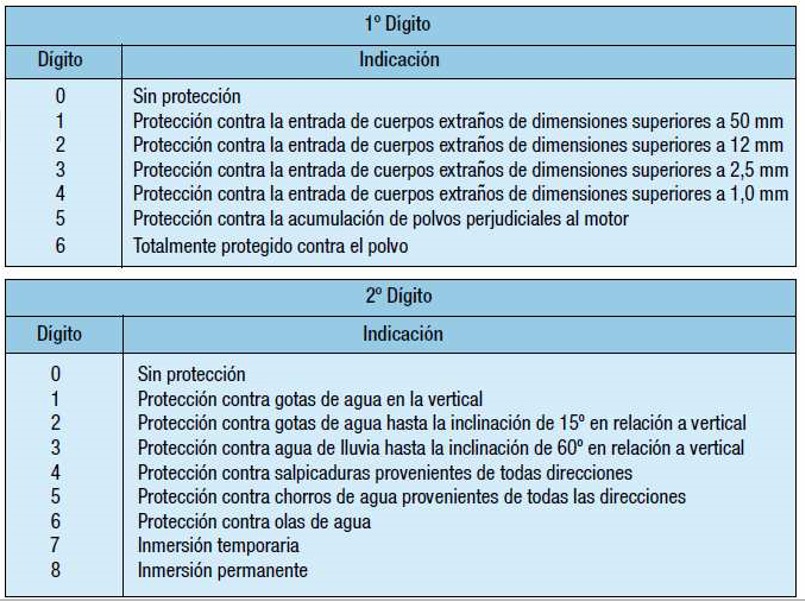
Es la protección del motor contra la entrada de cuerpos extraños (polvo, fibras, etc.), contacto accidental y penetración de agua.
Así, por ejemplo, un equipamiento a ser instalado en un local sujeto a chorros de agua, debe poseer un envoltorio capaz de soportar tales chorros de agua, bajo determinados valores de presión y ángulo de incidencia, sin que haya penetración que pueda ser perjudicial al funcionamiento del motor. El grado de protección es definido por dos letras (IP) seguido de dos dígitos.
El primer dígito indica protección contra la entrada de cuerpos extraños y contacto accidental, mientras el segundo dígito indica la protección contra la entrada de agua.
La carcasa/tamaño
Dimensiones del motor expresadas a través de valores estándares establecidos por normativas IEC para los motores eléctricos.
El tipo de carcasa es un dato fundamental en la elección del motor eléctrico, ya que permite identificar gran parte de sus dimensiones mecánicas.
El tamaño de la carcasa es definido por la potencia y rotación del motor y es identificado por la letra H, que va desde la base de soporte del motor hasta el centro del eje, medida en mm. La altura H es exactamente igual al modelo de la carcasa del motor, tratándose de motores IEC.
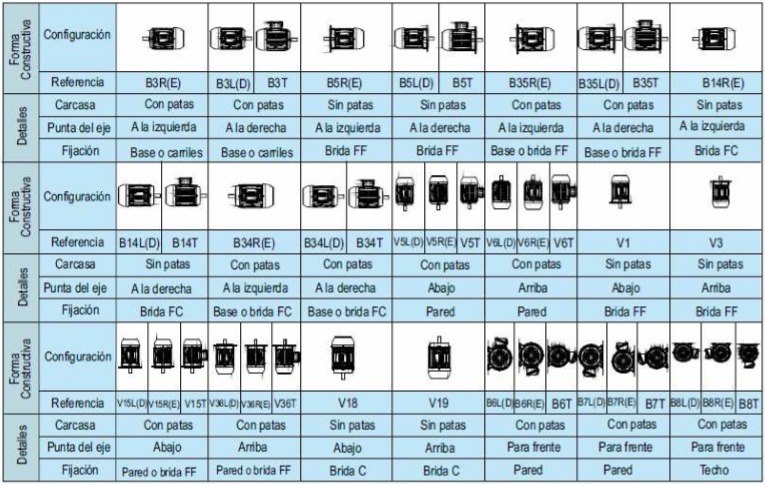
Las formas constructivas
Determinan cómo el motor va a ser fijado y acoplado a la carga.
Los motores eléctricos son normalmente suministrados en la forma constructiva B3D, (montaje en la posición horizontal, motor con patas, eje a la derecha mirando hacia la caja de conexión). Las demás formas constructivas pueden ser observadas en la tabla abajo.
Las clases de aislamiento
Especifican la temperatura de operación de los materiales aislantes utilizados en el devanado del motor.
Los motores normalmente son fabricados con clase de aislamiento F, que permite una temperatura máxima de operación de 155°, pero los motores también pueden ser fabricados con clase de aislamiento H, cuya temperatura máxima de operación permitida es de 180°.
La temperatura de la clase de aislamiento no significa la temperatura ambiente máxima, y sí la máxima temperatura que soportará el aislamiento del motor.
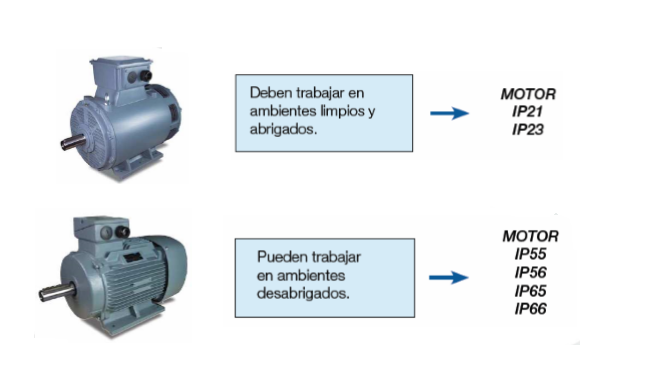
La ventilación
El sistema de ventilación es responsable por la refrigeración del motor. Los motores IP55 (cerrados) son generalmente suministrados con sistema de ventilación TCVE o TEFC. Los motores con grado de protección IP23(abiertos) poseen sistema de ventilación interna.

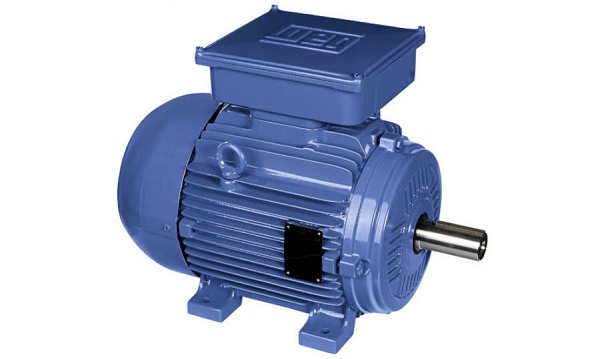
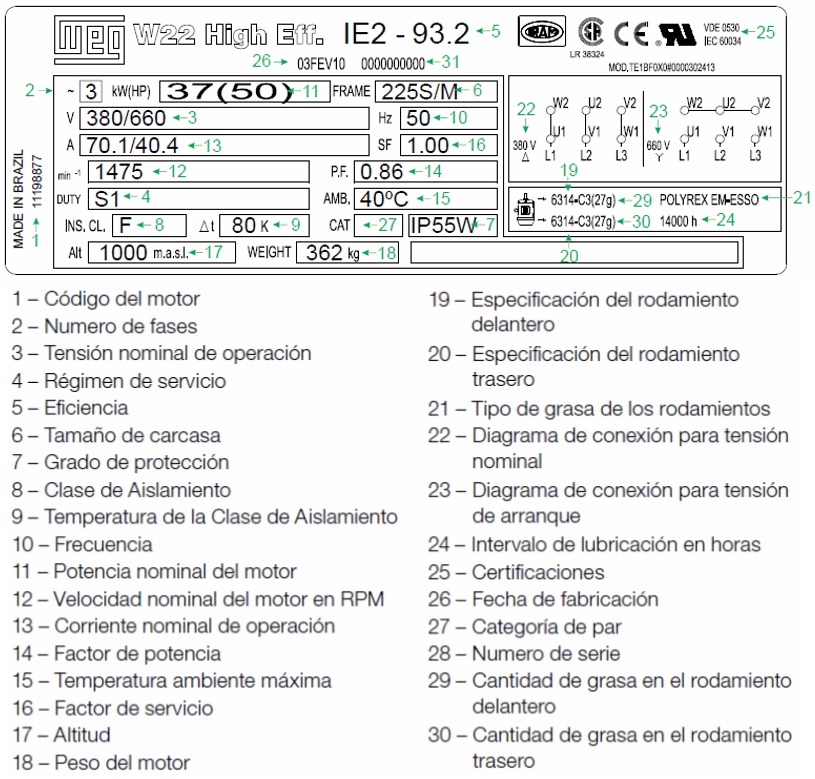
La placa de identificación
Normalmente nos da casi todos los datos necesarios para identificar el motor adecuadamente, os indicamos un ejemplo de placa de motor Weg identificando todos los puntos arriba descritos:
¡Si necesita más información al respecto, no dude en contactarnos!